Description of Function
| me218b_2015_project_description.pdf |
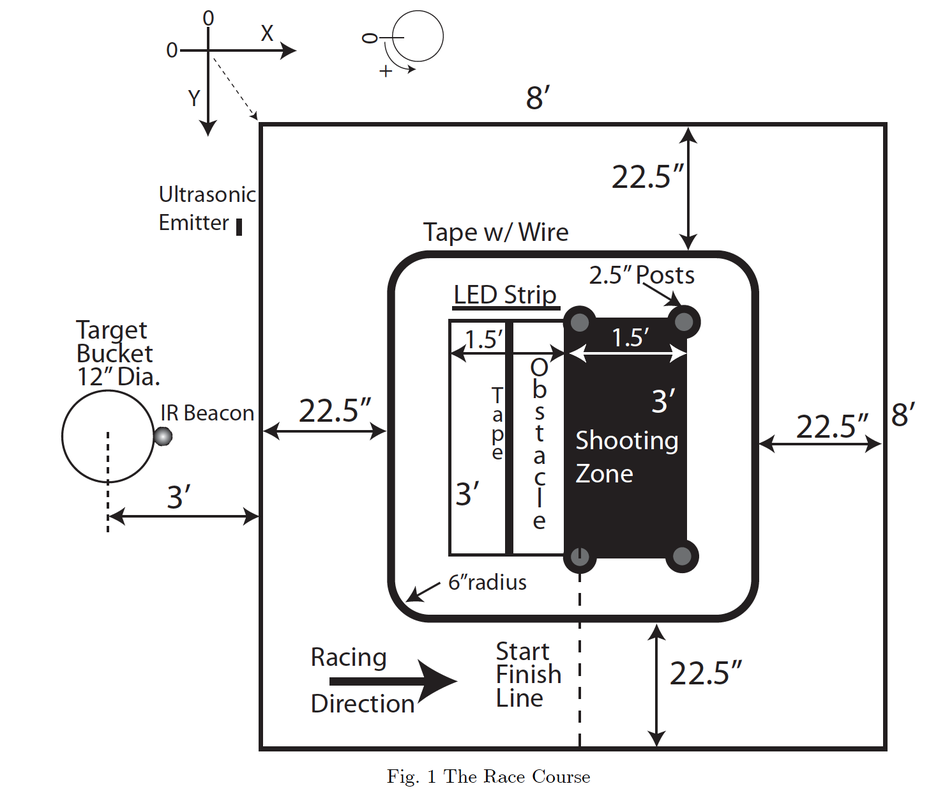
This was a racing game. The race was a head-to-head contest among KARTs (autonomous mobile robots) as they completed laps around the course passing across the obstacle (see-saw) and making at least one shot into the bucket. Our Kart was designed to rely on the DrEd Reckoning System (a computer vision system that output race status updates over SPI) to navigate around the course to complete the laps. A lap consisted of passing counterclockwise around the field. The race began when a query to the DrEd Reckoning System indicated that the game state had changed from "Waiting For Start" to "Flag Dropped".
Aiming at the bucket was achieved through a peak detection circuit and shooting used a pitching motor. Passing the obstacle depended on the sheer power of our DC motors and the damping of the Burrito.
The layout of the race course is shown below.
Aiming at the bucket was achieved through a peak detection circuit and shooting used a pitching motor. Passing the obstacle depended on the sheer power of our DC motors and the damping of the Burrito.
The layout of the race course is shown below.